Կնքված քորոցային մխոցային սահմանային անջատիչ

-

Ամուր բնակարան
-

Հուսալի գործողություն
-

Բարելավված կյանք
Ապրանքի նկարագրություն
Renew-ի RL8 շարքի մանրանկարչական սահմանային անջատիչները առանձնանում են ավելի մեծ դիմացկունությամբ և կոշտ միջավայրերի նկատմամբ դիմադրողականությամբ՝ մինչև 10 միլիոն մեխանիկական գործողության ժամկետով, ինչը դրանք հարմար է դարձնում կարևոր և ծանր աշխատանքների համար, որտեղ սովորական հիմնական անջատիչները չեն կարող օգտագործվել: Այս անջատիչներն ունեն բաժանվող պատյան, որը պատրաստված է ձուլածո ցինկի համաձուլվածքից և ջերմապլաստիկ ծածկույթից: Ծածկը հանվող է՝ հեշտ մուտքի և տեղադրման համար: Կոմպակտ դիզայնը թույլ է տալիս սահմանային անջատիչներն օգտագործել այն դեպքերում, երբ տեղադրման տարածքը սահմանափակ է:
Չափսեր և շահագործման բնութագրեր
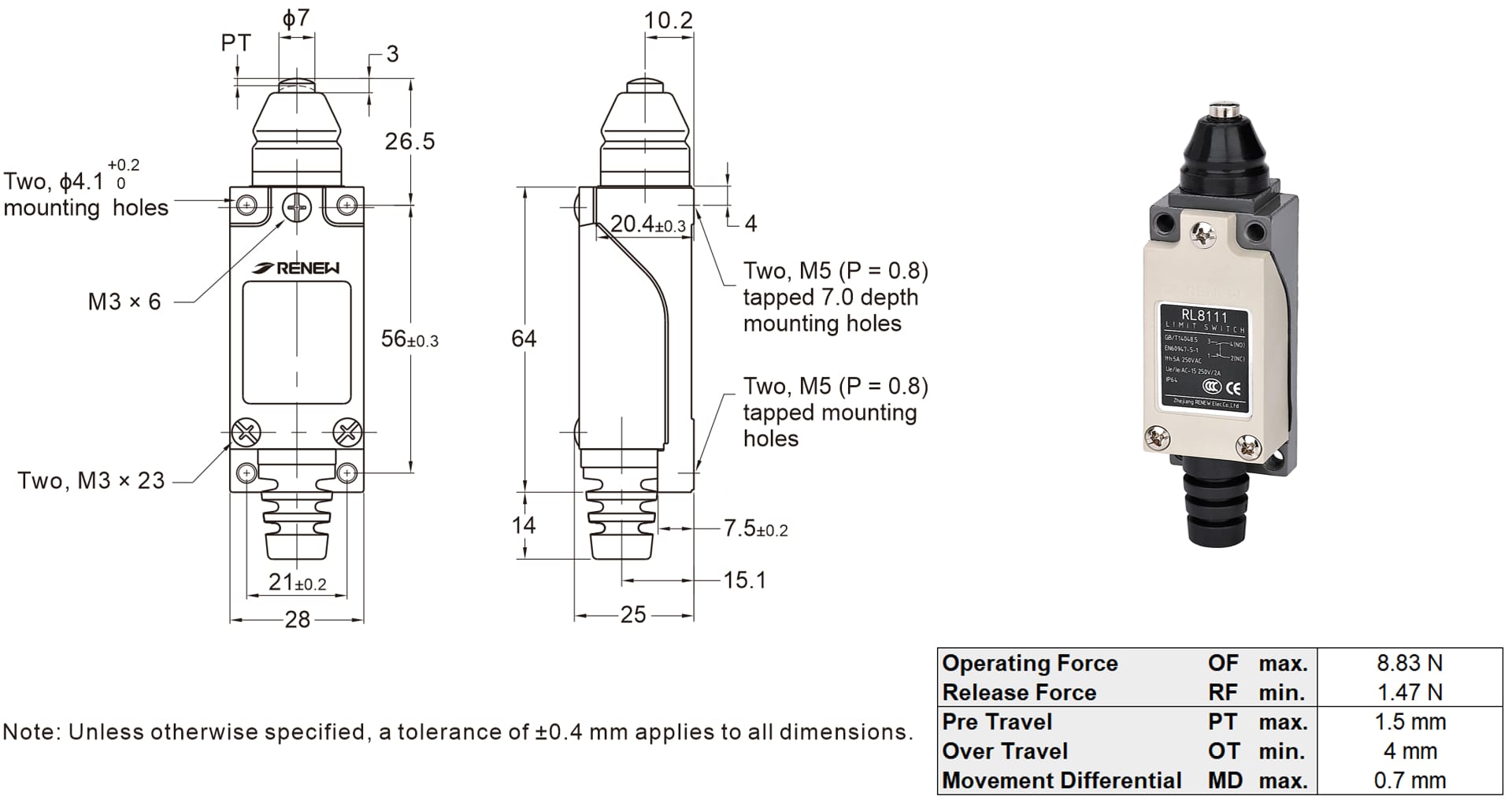
Ընդհանուր տեխնիկական տվյալներ
| Ամպերի վարկանիշ | 5 Ա, 250 Վ փոփոխական հոսանք |
| Մեկուսացման դիմադրություն | 100 ՄՕմ նվազագույն լարում (500 Վ հաստատուն լարման դեպքում) |
| Կոնտակտային դիմադրություն | 25 մՕմ առավելագույնը (սկզբնական արժեք) |
| Դիէլեկտրիկ ամրություն | Նույն բևեռականության կոնտակտների միջև 1000 Վ փոփոխական հոսանք, 50/60 Հց՝ 1 րոպեի ընթացքում |
| Հոսանքատար մետաղական մասերի և հողանցման միջև, ինչպես նաև յուրաքանչյուր ծայրակալի և ոչ հոսանքատար մետաղական մասերի միջև 2,000 ՎԱՓ, 50/60 Հց 1 րոպեի համար | |
| Թրթռման դիմադրություն անսարքության համար | 10-ից 55 Հց, 1.5 մմ կրկնակի ամպլիտուդ (անսարքություն՝ առավելագույնը 1 մվ) |
| Մեխանիկական կյանքը | Նվազագույնը 10,000,000 գործողություն (120 գործողություն/րոպե) |
| Էլեկտրական կյանք | 300,000 գործողություն նվազագույնը (նշանակված դիմադրության բեռի տակ) |
| Պաշտպանության աստիճան | Ընդհանուր նշանակության՝ IP64 |
Դիմում
Renew-ի մանրանկարչական սահմանային անջատիչները կարևոր դեր են խաղում տարբեր ոլորտներում տարբեր սարքերի անվտանգության, ճշգրտության և հուսալիության ապահովման գործում: Ահա դրանցից մի քանիսը, որոնք տարածված են կամ հնարավոր են:
Ռոբոտաշինություն և ավտոմատացված հավաքման գծեր
Ռոբոտաշինության մեջ այս անջատիչները օգտագործվում են ռոբոտացված ձեռքերի դիրքը որոշելու համար: Օրինակ, կնքված մխոցային սահմանային անջատիչը կարող է հայտնաբերել, թե երբ է ռոբոտացված ձեռքը հասնում իր շարժման ավարտին, ազդանշան ուղարկելով կառավարման համակարգին շարժումը դադարեցնելու կամ ուղղությունը փոխելու համար՝ ապահովելով ճշգրիտ կառավարում և կանխելով մեխանիկական վնասը:













