Կարճ ծխնի լծակի հիմնական անջատիչ

-

Բարձր ճշգրտություն
-

Բարելավված կյանք
-

Լայնորեն օգտագործվող
Ապրանքի նկարագրություն
Ծխնի լծակի ակտիվացուցիչի անջատիչը ապահովում է ընդլայնված հասանելիություն և ճկունություն ակտիվացման մեջ: Լծակի դիզայնը թույլ է տալիս հեշտ ակտիվացում և կատարյալ է այն կիրառությունների համար, որտեղ տարածքի սահմանափակումները կամ անհարմար անկյունները դժվարացնում են ուղղակի ակտիվացումը: Այն լայնորեն օգտագործվում է կենցաղային տեխնիկայում և արդյունաբերական կառավարման համակարգերում:
Չափսեր և շահագործման բնութագրեր
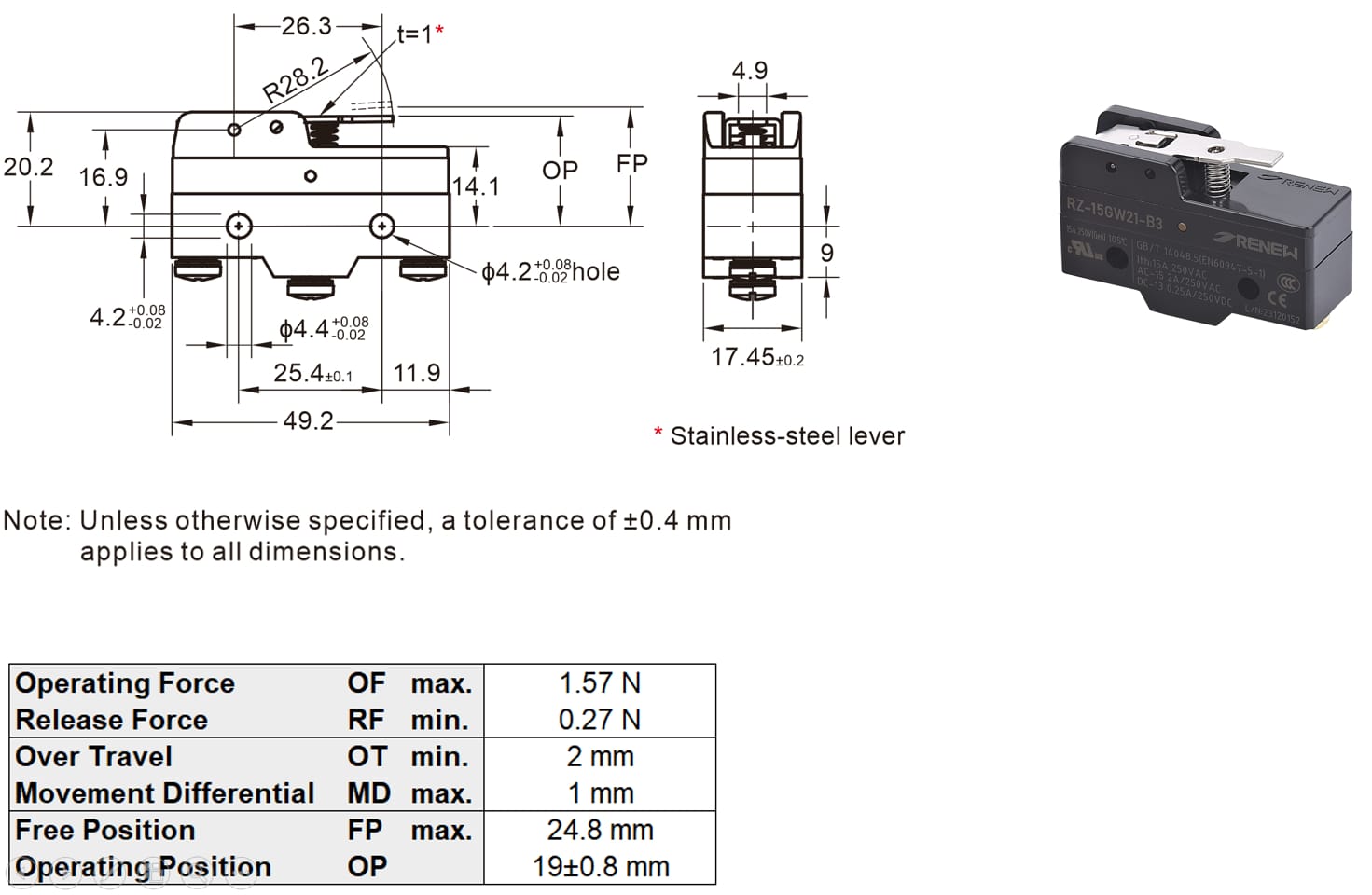
Ընդհանուր տեխնիկական տվյալներ
| Գնահատական | 15 Ա, 250 Վ փոփոխական հոսանք |
| Մեկուսացման դիմադրություն | 100 ՄՕմ նվազագույն լարում (500 Վ հաստատուն լարման դեպքում) |
| Կոնտակտային դիմադրություն | Առավելագույնը՝ 15 մՕմ (սկզբնական արժեք) |
| Դիէլեկտրիկ ամրություն | Նույն բևեռականության կոնտակտների միջև Կոնտակտային բաց G: 1000 VAC, 50/60 Hz 1 րոպեի ընթացքում Կոնտակտային բացվածք H: 600 VAC, 50/60 Hz 1 րոպեի ընթացքում Կոնտակտային բաց E: 1500 VAC, 50/60 Hz 1 րոպեի ընթացքում |
| Հոսանքատար մետաղական մասերի և հողանցման միջև, ինչպես նաև յուրաքանչյուր ծայրակալի և ոչ հոսանքատար մետաղական մասերի միջև՝ 2000 Վ փոփոխական հոսանք, 50/60 Հց, 1 րոպեի ընթացքում | |
| Թրթռման դիմադրություն անսարքության համար | 10-ից 55 Հց, 1.5 մմ կրկնակի ամպլիտուդ (անսարքություն՝ առավելագույնը 1 մվ) |
| Մեխանիկական կյանքը | Շփման բաց G, H: 10,000,000 գործողություն նվազագույնը։ Կոնտակտային բաց E: 300,000 գործողություն |
| Էլեկտրական կյանք | Շփման բաց G, H: նվազագույնը 500,000 գործողություն։ Կոնտակտային բաց E: նվազագույնը 100,000 գործողություն։ |
| Պաշտպանության աստիճան | Ընդհանուր նշանակության՝ IP00 Կաթիլներից պաշտպանվածություն. համարժեք է IP62-ին (բացառությամբ տերմինալների) |
Դիմում
Renew-ի հիմնական անջատիչները կարևոր դեր են խաղում տարբեր ոլորտներում տարբեր սարքերի անվտանգության, ճշգրտության և հուսալիության ապահովման գործում: Ահա դրանցից մի քանիսը, որոնք տարածված են կամ կարող են կիրառվել:

Սենսորներ և մոնիտորինգի սարքեր
Հաճախ օգտագործվում է արդյունաբերական կարգի սենսորներում և մոնիտորինգի սարքերում՝ ճնշումը և հոսքը կառավարելու համար՝ սարքերի ներսում ծառայելով որպես սեղմման մեխանիզմ։

Արդյունաբերական մեքենաներ
Օգտագործվում է հաստոցներում՝ սարքավորումների մասերի առավելագույն շարժը սահմանափակելու և աշխատանքային մասերի դիրքը հայտնաբերելու համար՝ ապահովելով ճշգրիտ դիրքավորում և անվտանգ շահագործում մշակման ընթացքում։
Հոդակապավոր ռոբոտային ձեռքեր և բռնակներ
Ինտեգրված է հոդակապավոր ռոբոտացված ձեռքերի մեջ՝ կառավարման հավաքվածքներում օգտագործելու և շարժման ավարտին ու ցանցային ուղղորդում ապահովելու համար: Ինտեգրված է ռոբոտացված ձեռքի դաստակի բռնիչների մեջ՝ բռնման ճնշումը զգալու համար:













